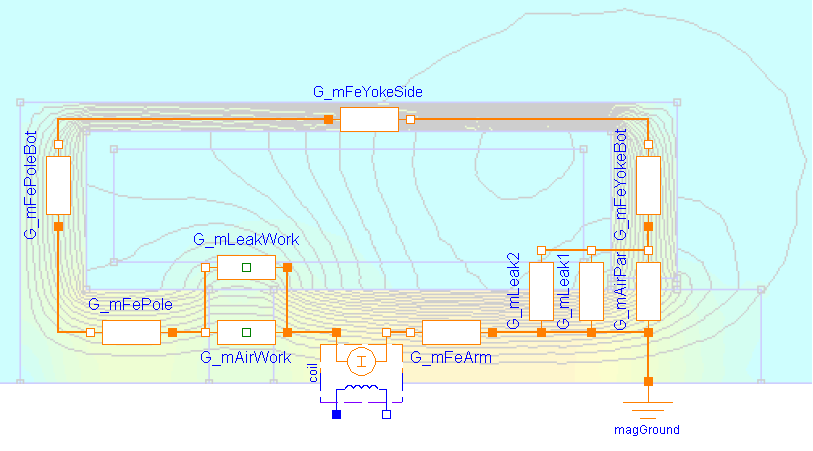
Please refer to the Parameters section for a schematic drawing of this axis-symmetric lifting magnet. In the half-section below, the flux tube elements of the actuator's magnetic circuit are superimposed on a field plot obtained with FEA. The magnetomotive force imposed by the coil is modelled as one lumped element. As a result, the radial leakage flux between armature and yoke that occurs especially at large working air gaps can not be considered properly. This leads to a a higher total reluctance and lower inductance respectively compared to FEA for large working air gaps (i.e., armature close to x_max). Please have a look at the comments associated with the individual model components for a short explanation of their purpose in the model.
The coupling coefficient c_coupl in the coil is set to 1 in this example, since leakage flux is accounted for explicitly with the flux tube element G_mLeakWork. Although this leakage model is rather simple, it describes the reluctance force due to the leakage field sufficiently, especially at large air gaps. With decreasing air gap length, the influence of the leakage flux on the actuator's net reluctance force decreases due to the increasing influence of the main working air gap G_mAirWork.
During model-based actuator design, the radii and lengths of the flux tube elements (and hence their cross-sectional areas and flux densities) should be assigned with parametric equations so that common design rules are met (e.g., allowed flux density in ferromagnetic parts, allowed current density and required cross-sectional area of winding). For simplicity, those equations are omitted in the example. Instead, the found values are assigned to the model elements directly.