This component models a spring damper combination that can lift off. It can be connected between a sliding mass and the housing (model Fixed), to describe the contact of a sliding mass with the housing.
As long as s_rel > s_rel0, no force is exerted (s_rel = flange_b.s - flange_a.s). If s_rel ≤ s_rel0, the contact force is basically computed with a linear spring/damper characteristic. With parameter n≥1 (exponent of spring force), a nonlinear spring force can be modeled:
desiredContactForce = c*|s_rel - s_rel0|^n + d*der(s_rel)
Note, Hertzian contact is described by:
The above force law leads to the following difficulties:
In the literature there are several proposals to fix problem (2). Especially, often the following model is used (see, e.g., Lankarani, Nikravesh: Continuous Contact Force Models for Impact Analysis in Multibody Systems, Nonlinear Dynamics 5, pp. 193-207, 1994, pdf-download):
f = c*s_rel^n + (d*s_rel^n)*der(s_rel)
However, this and other models proposed in literature violate issue (1), i.e., unphysical pulling forces can occur (if d*der(s_rel) becomes large enough). Note, if the force law is of the form "f = f_c + f_d", then a necessary condition is that |f_d| ≤ |f_c|, otherwise (1) and (2) are violated. For this reason, the most simplest approach is used in the ElastoGap model to fix both problems by using this necessary condition in the force law directly. If s_rel0 = 0, the equations are:
if s_rel ≥ 0 then
f = 0; // contact force
else
f_c = -c*|s_rel|^n; // contact spring force (Hertzian contact force)
f_d2 = d*der(s_rel); // linear contact damper force
f_d = if f_d2 < f_c then f_c else
if f_d2 > -f_c then -f_c else f_d2; // bounded damper force
f = f_c + f_d; // contact force
end if;
Note, since |f_d| ≤ |f_c|, pulling forces cannot occur and the contact force is always continuous, especially around the start of the penetration at s_rel = s_rel0.
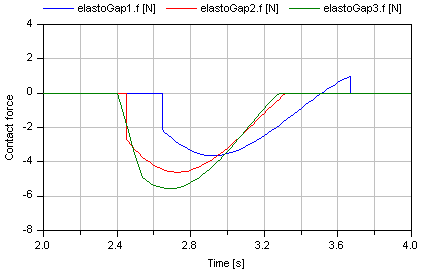
In the next figure, a typical simulation with the ElastoGap model is shown (Examples.ElastoGap) where the different effects are visualized: