Visualizers that will be replaced by improved versions in the future (do not use them)
This package contains components to construct 3-dim. fonts with "cylinder" elements for the animation window. This is just a temporary hack until 3-dim. fonts are supported in Modelica tools. The components are used to construct the "x", "y", "z" labels of coordinates systems in the animation.
Extends from Modelica.Icons.InternalPackage (Icon for an internal package (indicating that the package should not be directly utilized by user)).
| Name | Description |
|---|---|
| Visualizing a set of lines as cylinders (e.g., used to display characters) | |
| Visualizing a set of lines as cylinders with variable size, e.g., used to display characters (no Frame connector) |
 Modelica.Mechanics.MultiBody.Visualizers.Internal.FixedLines
Modelica.Mechanics.MultiBody.Visualizers.Internal.FixedLinesVisualizing a set of lines as cylinders (e.g., used to display characters)
With model FixedLines a set of lines is defined
that are located relatively to frame_a. Every line
is represented by a cylinder. This allows to define simple shaped
3-dimensional characters. An example is shown in the
following figure:
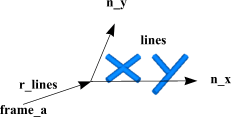
The two letters "x" and "y" are constructed with 4 lines
by providing the following data for parameter lines
lines = {[0, 0; 1, 1],[0, 1; 1, 0],[1.5, -0.5; 2.5, 1],[1.5, 1; 2, 0.25]}
Via parameter vectors n_x and n_y a two-dimensional coordinate system is defined. The points defined with parameter lines are with respect to this coordinate system. For example "[0, 0; 1, 1]" defines a line that starts at {0,0} and ends at {1,1}. The diameter and color of all line cylinders are identical.
Extends from Modelica.Mechanics.MultiBody.Interfaces.PartialVisualizer (Base model for visualizers (has a frame_a on the left side + outer world + assert to guarantee that the component is connected)).
| Name | Description |
|---|---|
| animation | = true, if animation shall be enabled |
| if animation = true | |
| scale | The 'lines' are visualized 'scale' times bigger |
| lines[:, 2, 2] | List of start and end points of cylinders resolved along n_x and n_y [m] |
| diameter | Diameter of the cylinders defined by lines [m] |
| r_lines[3] | Position vector from origin of frame_a to the origin of the 'lines' frame, resolved in frame_a [m] |
| n_x[3] | Vector in direction of x-axis of 'lines' frame, resolved in frame_a. [1] |
| n_y[3] | Vector in direction of y-axis of 'lines' frame, resolved in frame_a. [1] |
| color | Color of cylinders |
| specularCoefficient | Reflection of ambient light (= 0: light is completely absorbed) |
| Name | Description |
|---|---|
| frame_a | Coordinate system in which visualization data is resolved |
 Modelica.Mechanics.MultiBody.Visualizers.Internal.Lines
Modelica.Mechanics.MultiBody.Visualizers.Internal.LinesVisualizing a set of lines as cylinders with variable size, e.g., used to display characters (no Frame connector)
With model Lines a set of dynamic lines is defined
that are located relatively to frame_a. Every line
is represented by a cylinder. This allows, e.g., to define simple shaped
3-dimensional characters. Note, if the lines are fixed relatively to frame_a,
it is more convenient to use model Visualizers.FixedLines.
An example for dynamic lines is shown in the following figure:
The two letters "x" and "y" are constructed with 4 lines
by providing the following data for input variable lines
lines = {[0, 0; 1, 1],[0, 1; 1, 0],[1.5, -0.5; 2.5, 1],[1.5, 1; 2, 0.25]}
Via vectors n_x and n_y a two-dimensional coordinate system is defined. The points defined with variable lines are with respect to this coordinate system. For example "[0, 0; 1, 1]" defines a line that starts at {0,0} and ends at {1,1}. The diameter and color of all line cylinders are identical and are defined by parameters.
| Name | Description |
|---|---|
| R | Orientation object to rotate the world frame into the object frame |
| r[3] | Position vector from origin of world frame to origin of object frame, resolved in world frame [m] |
| r_lines[3] | Position vector from origin of object frame to the origin of 'lines' frame, resolved in object frame [m] |
| n_x[3] | Vector in direction of x-axis of 'lines' frame, resolved in object frame [1] |
| n_y[3] | Vector in direction of y-axis of 'lines' frame, resolved in object frame [1] |
| lines[:, 2, 2] | List of start and end points of cylinders resolved in an x-y frame defined by n_x, n_y, e.g., {[0,0;1,1], [0,1;1,0], [2,0; 3,1]} [m] |
| diameter | Diameter of the cylinders defined by lines [m] |
| color | Color of cylinders |
| specularCoefficient | Reflection of ambient light (= 0: light is completely absorbed) |