power_w = 2This package contains loss models and their parameter records used for machine models.
Extends from Modelica.Icons.Package (Icon for standard packages).
| Name | Description |
|---|---|
BrushParameters | Parameter record for brush losses |
CoreParameters | Parameter record for core losses |
DCMachines … | Loss models for DC machines |
Friction | Model of angular velocity dependent friction losses |
FrictionParameters | Parameter record for friction losses |
InductionMachines … | Loss models for induction machines |
PermanentMagnetLossParameters | Parameter record for permanent magnet losses |
StrayLoadParameters | Parameter record for stray load losses |
Parameter record for Friction losses.
Extends from Modelica.Icons.Record (Icon for records).
| Type | Name | Description |
|---|---|---|
parameter Power | PRef | Reference friction losses at wRef |
parameter AngularVelocity | wRef | Reference angular velocity that the PRef refer to |
parameter Real | power_w | Exponent of friction torque w.r.t. angular velocity |
parameter Torque | tauRef | Reference friction torque at reference angular velocity |
parameter Real | linear | Linear angular velocity range with respect to reference angular velocity |
parameter AngularVelocity | wLinear | Linear angular velocity range |
parameter Torque | tauLinear | Torque corresponding with linear angular velocity range |
Parameter record for three-phase Brush and DC Brush losses.
Extends from Modelica.Icons.Record (Icon for records).
| Type | Name | Description |
|---|---|---|
parameter Voltage | V | Total voltage drop of brushes for currents > ILinear |
parameter Current | ILinear | Current indicating linear voltage region of brush voltage drop |
Parameter record for three-phase and DC stray load losses.
Extends from Modelica.Icons.Record (Icon for records).
| Type | Name | Description |
|---|---|---|
parameter Power | PRef | Reference stray load losses at IRef and wRef |
parameter Current | IRef | Reference RMS current that PRef refers to |
parameter AngularVelocity | wRef | Reference angular velocity that PRef refers to |
parameter Real | power_w | Exponent of stray load loss torque w.r.t. angular velocity |
parameter Torque | tauRef | Reference stray load torque at reference angular velocity and reference current |
Parameter record for core losses of induction machines and core losses of DC machines.
Extends from Modelica.Icons.Record (Icon for records).
| Type | Name | Description |
|---|---|---|
parameter Integer | m | Number of phases (1 for DC, 3 for induction machines) |
parameter Power | PRef | Reference core losses at reference inner voltage VRef |
parameter Voltage | VRef | Reference inner RMS voltage that reference core losses PRef refer to |
parameter AngularVelocity | wRef | Reference angular velocity that reference core losses PRef refer to |
parameter Real | ratioHysteresis | Ratio of hysteresis losses with respect to the total core losses at VRef and fRef |
parameter Conductance | GcRef | Reference conductance at reference frequency and voltage |
parameter AngularVelocity | wMin |
Parameter record for permanent magnet losses.
Extends from Modelica.Icons.Record (Icon for records).
| Type | Name | Description |
|---|---|---|
parameter Power | PRef | Reference permanent magnet losses at IRef and wRef |
parameter Real | c | Part of permanent magnet losses at current = 0, i.e. independent of current |
parameter Current | IRef | Reference stator RMS current that PRef refers to |
parameter Real | power_I | Exponent of permanent magnet loss torque w.r.t. stator current |
parameter AngularVelocity | wRef | Reference angular velocity that PRef refers to |
parameter Real | power_w | Exponent of permanent magnet loss torque w.r.t. angular velocity |
parameter Torque | tauRef | Reference permanent magnet loss torque at reference angular velocity and reference current |
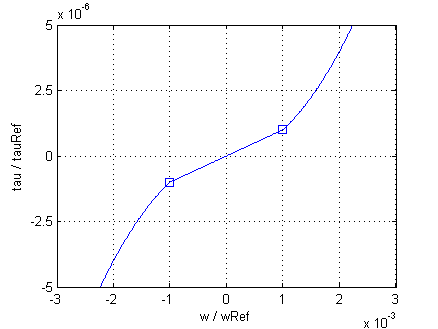
The friction losses are considered by the equations
tau / tauRef = (+w / wRef) ^ power_w for w > +wLinear - tau / tauRef = (-w / wRef) ^ power_w for w < -wLinear
with
tauRef * wRef = PRef
being the friction torque at the reference angular velocity
wRef. The exponent power_w is
approximately 1.5 for axial ventilation and approximately 2.0 for radial ventilation.
For stability reasons the friction torque tau is approximated by a linear curve
tau / tauLinear = w / wLinear
with
tauLinear = tauRef*(wLinear/wRef) ^ power_w
in the range -wLinear ≤ w ≤ wLinear with wLinear = 0.001 * wRef. The relationship of torque
and angular velocity is depicted in Fig. 1
| |
Fig. 1: Friction loss torque versus angular velocity for power_w = 2 |
If it is desired to neglect friction losses, set frictionParameters.PRef = 0 (this is the default).
Extends from Modelica.Electrical.Machines.Interfaces.FlangeSupport (Shaft and support) and Modelica.Thermal.HeatTransfer.Interfaces.PartialElementaryConditionalHeatPortWithoutT (Partial model to include a conditional HeatPort in order to dissipate losses, used for textual modeling, i.e., for elementary models).
| Type | Name | Default | Description |
|---|---|---|---|
FrictionParameters | frictionParameters | Friction loss parameters | |
Boolean | useHeatPort | false | =true, if heatPort is enabled |
| Type | Name | Description |
|---|---|---|
Flange_a | flange | Shaft end |
Flange_a | support | Housing and support |
HeatPort_a | heatPort | Optional port to which dissipated losses are transported in form of heat |
Generated 2018-12-12 12:10:14 EST by MapleSim.