This is a third version of the "four-bar" mechanism, see figure:
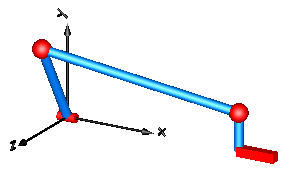
In this case the three revolute joints on the left top-side and the two revolute joints on the right top side have been replaced by the assembly joint Joints.Assemblies.JointSSP which consists of two spherical joints and one prismatic joint. Since JointSSP solves the non-linear constraint equation internally analytically, no non-linear equation appears any more and a Modelica translator can transform the system into state space form without solving a system of equations. For more details, see MultiBody.UsersGuide.Tutorial.LoopStructures.AnalyticLoopHandling.