PointGravityWithPointMasses2Rigidly connected point masses in a point gravity field |
|
Diagram
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
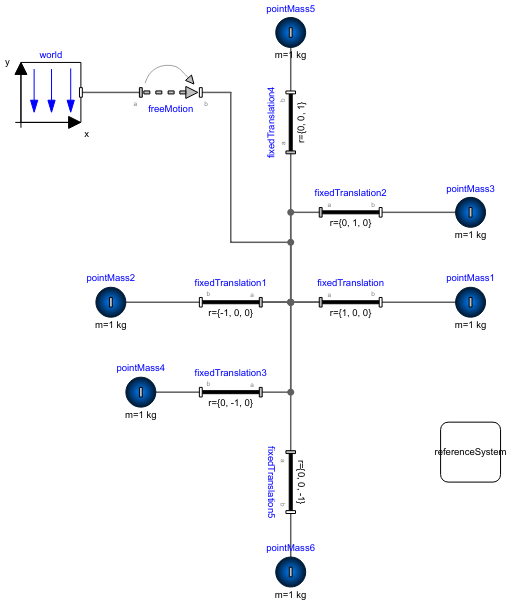
This model demonstrates the usage of model Parts.PointMass in a point gravity field. 6 point masses are connected rigidly together. Translating such a model results in an error, because point masses do not define an orientation object. The example demonstrates that in such a case (when the orientation object is not defined by an object that is connected to a point mass), a "MultiBody.Joints.FreeMotion" joint has to be used, to define the degrees of freedom of this structure.
In order to demonstrate that this approach is correct, in model "referenceSystem", the same system is again provided, but this time modeled with a generic body (Parts.Body) where the inertia tensor is set to zero. In this case, no FreeMotion object is needed because every body provides its absolute translational and rotational position and velocity as potential states.
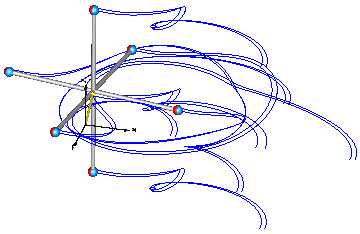
The two systems should move exactly in the same way. The system with the PointMasses
object visualizes the point masses in "red", whereas the "referenceSystem" shows
its bodies in "blue".
Components (15)
| pointMass1 |
Type: PointMass |
|
|---|---|---|
| pointMass2 |
Type: PointMass |
|
| pointMass3 |
Type: PointMass |
|
| pointMass4 |
Type: PointMass |
|
| pointMass5 |
Type: PointMass |
|
| pointMass6 |
Type: PointMass |
|
| fixedTranslation |
Type: FixedTranslation |
|
| fixedTranslation1 |
Type: FixedTranslation |
|
| fixedTranslation2 |
Type: FixedTranslation |
|
| fixedTranslation3 |
Type: FixedTranslation |
|
| fixedTranslation4 |
Type: FixedTranslation |
|
| fixedTranslation5 |
Type: FixedTranslation |
|
| world |
Type: World |
|
| freeMotion |
Type: FreeMotion |
|
| referenceSystem |
Type: SystemWithStandardBodies |