Engine1b_analyticModel of one cylinder engine with gas force and analytic loop handling |
|
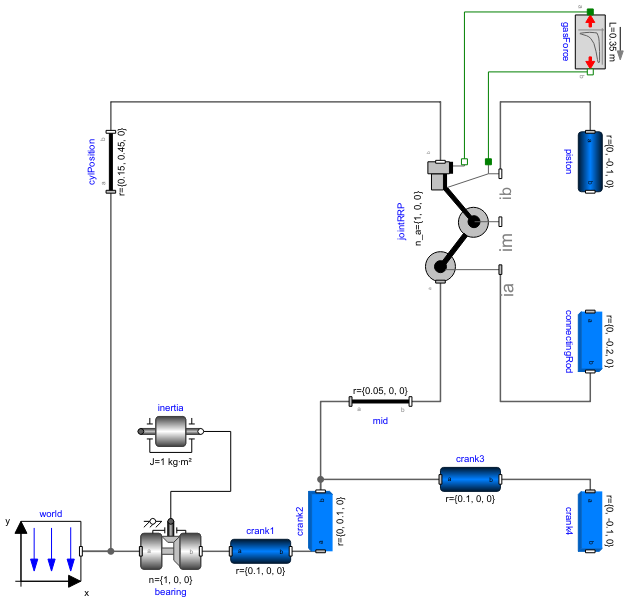
Diagram
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
This is the same model as Loops.Engine1b. The only difference is that the central part of the planar kinematic loop has been replaced by the assembly joint "Modelica.Mechanics.MultiBody.Joints.Assemblies.JointRRP". The advantage of using JointRRP is, that the non-linear algebraic equation of this loop is solved analytically, and not numerically as in Loops.Engine1b.
An animation of this example is shown in the figure below.
Components (13)
| world |
Type: World |
|
|---|---|---|
| piston |
Type: BodyCylinder |
|
| connectingRod |
Type: BodyBox |
|
| bearing |
Type: Revolute |
|
| inertia |
Type: Inertia |
|
| crank1 |
Type: BodyCylinder |
|
| crank2 |
Type: BodyBox |
|
| crank3 |
Type: BodyCylinder |
|
| crank4 |
Type: BodyBox |
|
| mid |
Type: FixedTranslation |
|
| cylPosition |
Type: FixedTranslation |
|
| gasForce |
Type: GasForce2 |
|
| jointRRP |
Type: JointRRP |