PlanarFourbarPlanar four bars mechanism with one kinematic loop (with RevolutePlanarLoopConstraint joint) |
|
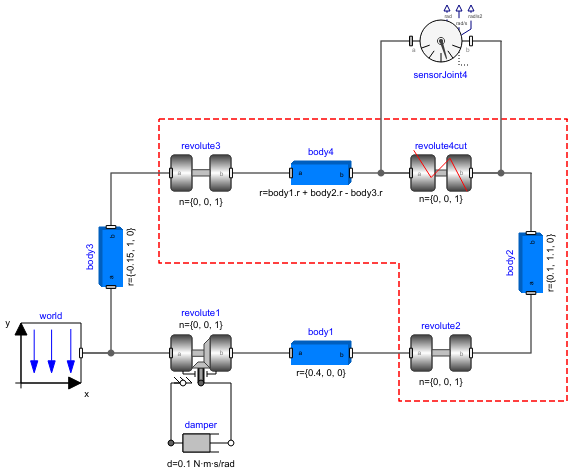
Diagram
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
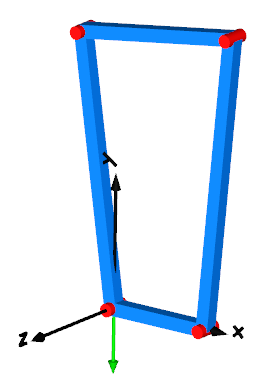
A planar four link mechanism demonstrating possible usage of the RevolutePlanarLoopConstraint. In this planar example, all the revolute joints rotate about axes perpendicular to the x-y plane, i.e. they all are parallel to each other. To enable a unique numerical solution in such a case, one RevolutePlanarLoopConstraint has to be introduced instead of the common revolute joint.
Another option is to use the assembly joint Joints.Assemblies.JointRRR instead of a part of the mechanism, as demonstrated in the example PlanarLoops_analytic.