TorusVisualizing a torus |
|
Diagram

Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
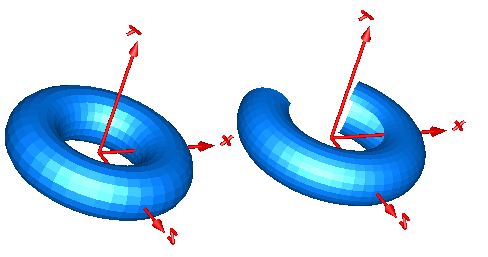
Model Torus visualizes a torus. The center of the torus is located at connector frame_a (visualized by the red coordinate system in the figure below). The left image below shows a torus with R = 0.5 m and r = 0.2 m. The right images below shows the torus with the additional parameter settings:
opening = 45 degree startAngle = -135 degree stopAngle = 135 degree
In the advanced menu the discretization of the surface visualization can be defined by
the number nR of points along the major radius of the torus and by
the number nr of points along the minor radius of the torus.
In case the torus is closed (that is, opening = 0 degree),
the actual number of points is one less (that is nR - 1, nr - 1), because the first and
the last point of the parametrization coincide in this case.
Parameters (9)
| animation |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
|---|---|
| R |
Value: 0.5 Type: Radius (m) Description: Major radius (distance from center of torus to center of tube) |
| r |
Value: 0.1 Type: Radius (m) Description: Minor radius (radius of tube) |
| opening |
Value: 0 Type: Angle (rad) Description: Opening angle of torus |
| startAngle |
Value: -3.1415926535898 Type: Angle (rad) Description: Start angle of torus slice |
| stopAngle |
Value: 3.1415926535898 Type: Angle (rad) Description: End angle of torus slice |
| wireframe |
Value: false Type: Boolean Description: = true: 3D model will be displayed without faces |
| n_R |
Value: 40 Type: Integer Description: Number of points along major radius R |
| n_r |
Value: 20 Type: Integer Description: Number of points along minor radius r |
Inputs (3)
| color |
Default Value: {0, 128, 255} Type: RealColor Description: Color of surface |
|---|---|
| specularCoefficient |
Default Value: 0.7 Type: SpecularCoefficient Description: Reflection of ambient light (= 0: light is completely absorbed) |
| transparency |
Default Value: 0 Type: Real Description: Transparency of shape: 0 (= opaque) ... 1 (= fully transparent) |
Connectors (1)
| frame_a |
Type: Frame_a Description: Coordinate system in which visualization data is resolved |
|---|
Components (2)
Used in Examples (1)
|
Modelica.Mechanics.MultiBody.Examples.Elementary Demonstrate the visualization of a sine surface, as well as a torus and a wheel constructed from a surface |