| Name | Description |
|---|---|
ForceAndTorque | Obsolete model. Use instead Modelica.Mechanics.MultiBody.Forces.ForceAndTorque |
FrameForceAndTorque | Obsolete model. Use instead Modelica.Mechanics.MultiBody.Forces.ForceAndTorque |
WorldForceAndTorque | Obsolete model. Use instead Modelica.Mechanics.MultiBody.Forces.WorldForceAndTorque |
The 6 signals of the load connector are interpreted as the x-, y- and z-coordinates of a force and as the x-, y-, and z-coordinates of a torque resolved in the world frame and acting at the frame connector to which this component is attached. The input signals are mapped to the force and torque in the following way:
force = load[1:3] torque = load[4:6]
The force and torque are by default visualized as an arrow (force) and as a double arrow (torque) acting at the connector to which they are connected. The diameters and colors of the arrows are fixed and can be defined via parameters forceDiameter, torqueDiameter, forceColor and torqueColor. The arrows point in the directions defined by the inPort.signal signals. The lengths of the arrows are proportional to the length of the force and torque vectors, respectively, using parameters N_to_m and Nm_to_m as scaling factors. For example, if N_to_m = 100 N/m, then a force of 350 N is displayed as an arrow of length 3.5 m.
An example how to use this model is given in the following figure:
This leads to the following animation
Extends from Modelica.Mechanics.MultiBody.Interfaces.PartialOneFrame_b (Base model for components providing one frame_b connector + outer world + assert to guarantee that the component is connected) and ObsoleteModelica3.Icons.ObsoleteModel (Icon for an obsolete model (use only for this case)).
| Type | Name | Default | Description |
|---|---|---|---|
Boolean | animation | true | = true, if animation shall be enabled |
Real | N_to_m | world.defaultN_to_m | Force arrow scaling (length = force/N_to_m) |
Real | Nm_to_m | world.defaultNm_to_m | Torque arrow scaling (length = torque/Nm_to_m) |
| Type | Name | Description |
|---|---|---|
Frame_b | frame_b | Coordinate system fixed to the component with one cut-force and cut-torque |
input RealInput | load[6] | [1:6] = x-, y-, z-coordinates of force and x-, y-, z-coordiantes of torque resolved in world frame |
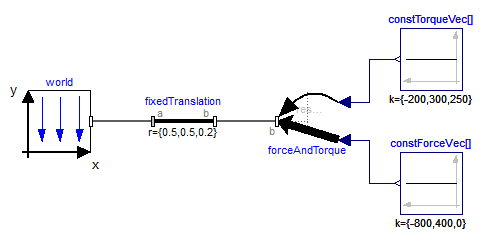
The 6 signals of the load connector are interpreted as the x-, y- and z-coordinates of a force and as the x-, y-, and z-coordinates of a torque acting at the frame connector to which this component is attached. If connector frame_resolve is not connected, the force and torque coordinates are with respect to frame_b. If connector frame_resolve is connected, the force and torque coordinates are with respect to frame_resolve. In this case the force and torque in connector frame_resolve are set to zero, i.e., this connector is solely used to provide the information of the coordinate system, in which the force coordinates are defined. The input signals are mapped to the force and torque in the following way:
force = load[1:3] torque = load[4:6]
The force and torque are by default visualized as an arrow (force) and as a double arrow (torque) acting at the connector to which they are connected. The diameters and colors of the arrows are fixed and can be defined via parameters forceDiameter, torqueDiameter, forceColor and torqueColor. The arrows point in the directions defined by the inPort.signal signals. The lengths of the arrows are proportional to the length of the force and torque vectors, respectively, using parameters N_to_m and Nm_to_m as scaling factors. For example, if N_to_m = 100 N/m, then a force of 350 N is displayed as an arrow of length 3.5 m.
An example how to use this model is given in the following figure:
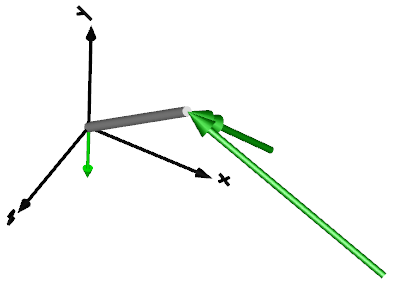
This leads to the following animation
Extends from Modelica.Mechanics.MultiBody.Interfaces.PartialOneFrame_b (Base model for components providing one frame_b connector + outer world + assert to guarantee that the component is connected) and ObsoleteModelica3.Icons.ObsoleteModel (Icon for an obsolete model (use only for this case)).
| Type | Name | Default | Description |
|---|---|---|---|
Boolean | animation | true | = true, if animation shall be enabled |
Real | N_to_m | world.defaultN_to_m | Force arrow scaling (length = force/N_to_m) |
Real | Nm_to_m | world.defaultNm_to_m | Torque arrow scaling (length = torque/Nm_to_m) |
| Type | Name | Description |
|---|---|---|
Frame_b | frame_b | Coordinate system fixed to the component with one cut-force and cut-torque |
Frame_resolve | frame_resolve | If connected, the input signals are resolved in this frame |
input RealInput | load[6] | [1:6] = x-, y-, z-coordinates of force and x-, y-, z-coordiantes of torque resolved in frame_b or frame_resolved (if connected) |
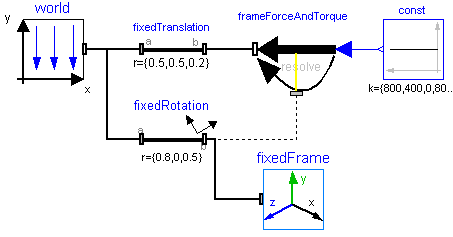
The 6 signals of the load connector are interpreted as the x-, y- and z-coordinates of a force and as the x-, y-, and z-coordinates of a torque acting at the frame connector to which frame_b of this component is attached. If connector frame_resolve is not connected, the force and torque coordinates are with respect to frame_b. If connector frame_resolve is connected, the force and torque coordinates are with respect to frame_resolve. In this case the force and torque in connector frame_resolve are set to zero, i.e., this connector is solely used to provide the information of the coordinate system, in which the force/torque coordinates are defined. The input signals are mapped to the force and torque in the following way:
force = load[1:3] torque = load[4:6]
Additionally, a force and torque acts on frame_a in such a way that the force and torque balance between frame_a and frame_b is fulfilled.
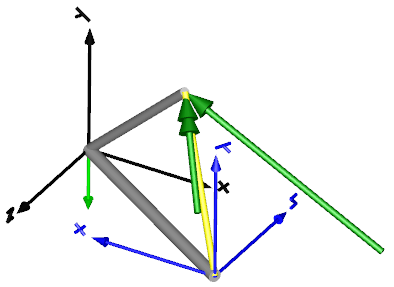
An example how to use this model is given in the following figure:
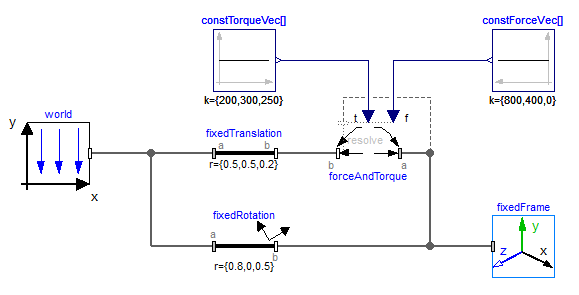
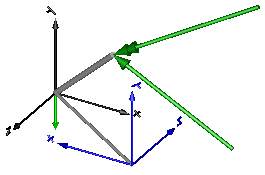
This leads to the following animation (the yellow cylinder characterizes the line between frame_a and frame_b of the ForceAndTorque component, i.e., the force and torque acts with negative sign also on the opposite side of this cylinder, but for clarity this is not shown in the animation):
Extends from Modelica.Mechanics.MultiBody.Interfaces.PartialTwoFrames (Base model for components providing two frame connectors + outer world + assert to guarantee that the component is connected) and ObsoleteModelica3.Icons.ObsoleteModel (Icon for an obsolete model (use only for this case)).
| Type | Name | Default | Description |
|---|---|---|---|
Boolean | animation | true | = true, if animation shall be enabled |
Real | N_to_m | world.defaultN_to_m | Force arrow scaling (length = force/N_to_m) |
Real | Nm_to_m | world.defaultNm_to_m | Torque arrow scaling (length = torque/Nm_to_m) |
| Type | Name | Description |
|---|---|---|
Frame_a | frame_a | Coordinate system a fixed to the component with one cut-force and cut-torque |
Frame_b | frame_b | Coordinate system b fixed to the component with one cut-force and cut-torque |
Frame_resolve | frame_resolve | If connected, the input signals are resolved in this frame |
input RealInput | load[6] | [1:6] = x-, y-, z-coordinates of force and x-, y-, z-coordiantes of torque resolved in frame_b or frame_resolved (if connected) |
Generated 2018-12-12 12:17:44 EST by MapleSim.