This package contains different examples to show how mechanical systems with kinematic loops can be modeled.
| Model | Description |
|---|---|
| Engine1a Engine1b Engine1b_analytic |
Model of one cylinder engine (Engine1a: simple, without
combustion; Engine1b: with combustion; Engine1b_analytic: same as
Engine1b but analytic loop handling)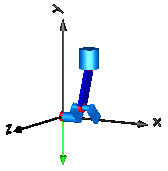
|
| EngineV6 EngineV6_analytic |
V6 engine with 6 cylinders, 6 planar loops and 1
degree-of-freedom. Second version with analytic handling of
kinematic loops and CAD data animation.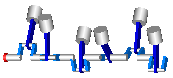

|
| Fourbar1 | One kinematic loop with four bars (with only revolute joints; 5
non-linear equations)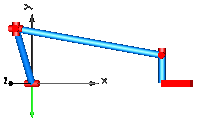
|
| Fourbar2 | One kinematic loop with four bars (with UniversalSpherical
joint; 1 non-linear equation)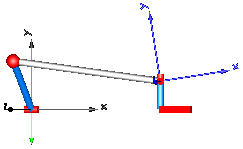
|
| Fourbar_analytic | One kinematic loop with four bars (with JointSSP joint;
analytic solution of non-linear algebraic loop)
|
| PlanarFourbar | Planar four bars with one kinematic loop (with
RevolutePlanarLoopConstraint joint)
|
| PlanarLoops_analytic | Mechanism with three planar kinematic loops and one
degree-of-freedom with analytic loop handling (with JointRRR
joints)
|
| Name | Description |
|---|---|
| Model of one cylinder engine | |
| Model of one cylinder engine with gas force and preparation for assembly joint JointRRP | |
|
|
Model of one cylinder engine with gas force and analytic loop handling |
| V6 engine with 6 cylinders, 6 planar loops and 1 degree-of-freedom | |
|
|
V6 engine with 6 cylinders, 6 planar loops, 1 degree-of-freedom and analytic handling of kinematic loops |
| One kinematic loop with four bars (with only revolute joints; 5 non-linear equations) | |
| One kinematic loop with four bars (with UniversalSpherical joint; 1 non-linear equation) | |
|
|
One kinematic loop with four bars (with JointSSP joint; analytic solution of non-linear algebraic loop) |
| Planar four bars mechanism with one kinematic loop (with RevolutePlanarLoopConstraint joint) | |
|
|
Mechanism with three planar kinematic loops and one degree-of-freedom with analytic loop handling (with JointRRR joints) |
| Utility models for Examples.Loops |