RollingWheelIdeal rolling wheel on flat surface z=0 (5 positional, 3 velocity degrees of freedom) |
|
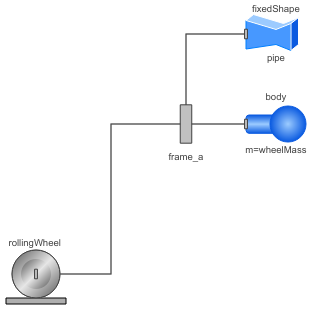
Diagram
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
A wheel rolling on the x-y plane of the world frame including
wheel mass and simple visualization.
The rolling contact is considered being ideal, i.e. there is no
slip between the wheel and the ground.
The wheel can not take off but it can incline toward the ground.
The frame frame_a is placed in the wheel center point and rotates
with the wheel itself. Therefore, a
rotational joint
with rotation axis n={0,1,0} should be used to
connect the wheel to a carrier.
Note
To work properly, the gravity acceleration vector g of the world must point in the negative z-axis, i.e.
inner Modelica.Mechanics.MultiBody.World world(n={0,0,-1});
Parameters (9)
| animation |
Value: true Type: Boolean Description: = true, if animation of wheel shall be enabled |
|---|---|
| wheelRadius |
Value: Type: Radius (m) Description: Radius of wheel |
| wheelMass |
Value: Type: Mass (kg) Description: Mass of wheel |
| wheel_I_axis |
Value: Type: Inertia (kg·m²) Description: Inertia along the wheel axis |
| wheel_I_long |
Value: Type: Inertia (kg·m²) Description: Inertia perpendicular to the wheel axis |
| stateSelect |
Value: StateSelect.always Type: StateSelect Description: Priority to use generalized coordinates as states |
| width |
Value: 0.035 Type: Distance (m) Description: Width of wheel |
| hollowFraction |
Value: 0.8 Type: Real Description: 1.0: Completely hollow, 0.0: rigid cylinder |
| wheelColor |
Value: {30, 30, 30} Type: Color Description: Color of wheel |
Connectors (1)
| frame_a |
Type: Frame_a Description: Frame fixed in wheel center point (y-axis: along wheel axis, z-axis: upwards) |
|---|
Components (3)
| body |
Type: Body |
|
|---|---|---|
| rollingWheel |
Type: RollingWheel |
|
| fixedShape |
Type: FixedShape |
Used in Examples (1)
|
Modelica.Mechanics.MultiBody.Examples.Elementary Single wheel rolling on ground starting from an initial speed |