Internal package, should not be used by user
Package with classes that are used within package Sensors. The classes in this package should not be directly used by a user.
Extends from Modelica.Icons.InternalPackage (Icon for an internal package (indicating that the package should not be directly utilized by user)).
| Name | Description |
|---|---|
| Base class for absolute sensor models | |
| Base class for absolute sensor models defined by equations (frame_resolve must be connected exactly once) | |
| Base class for relative sensor models | |
| Base class for relative sensor models defined by equations (frame_resolve must be connected exactly once) | |
| Basic sensor to measure absolute position vector | |
| Basic sensor to measure absolute angular velocity | |
| Basic sensor to measure relative position vector | |
| Basic sensor to measure relative angular velocity | |
| Transform absolute vector into another frame | |
| Transform relative vector into another frame | |
| Base class to measure cut force and/or torque between two frames, defined by components | |
| Base class to measure cut force and/or torque between two frames, defined by equations (frame_resolve must be connected exactly once) | |
| Basic sensor to measure cut force vector (frame_resolve must be connected) | |
| Basic sensor to measure cut torque vector (frame_resolve must be connected) |
 Modelica.Mechanics.MultiBody.Sensors.Internal.PartialAbsoluteSensor
Modelica.Mechanics.MultiBody.Sensors.Internal.PartialAbsoluteSensorBase class for absolute sensor models
This is a base class of a 3-dim. mechanical component with one frame frame_a in order to measure an absolute quantity of this connector. This partial class can be used for sensors defined either by components or by equations.
Extends from Modelica.Icons.RoundSensor (Icon representing a round measurement device).
| Name | Description |
|---|---|
| frame_a | Coordinate system a of which the absolute kinematic quantities are measured |
 Modelica.Mechanics.MultiBody.Sensors.Internal.PartialAbsoluteBaseSensor
Modelica.Mechanics.MultiBody.Sensors.Internal.PartialAbsoluteBaseSensorBase class for absolute sensor models defined by equations (frame_resolve must be connected exactly once)
Partial base class for absolute sensor models defined by equations. The connector frame_resolve is always enabled and must be connected exactly once.
Extends from Modelica.Icons.RoundSensor (Icon representing a round measurement device).
| Name | Description |
|---|---|
| frame_a | Coordinate system from which kinematic quantities are measured |
| frame_resolve | Coordinate system in which output vector(s) is optionally resolved |
 Modelica.Mechanics.MultiBody.Sensors.Internal.PartialRelativeSensor
Modelica.Mechanics.MultiBody.Sensors.Internal.PartialRelativeSensorBase class for relative sensor models
This is a base class of a 3-dim. mechanical component with two frames frame_a and frame_b in order to measure a relative quantity between these two connectors. This partial class can be used for sensors defined either by components or by equations.
Extends from Modelica.Icons.RoundSensor (Icon representing a round measurement device).
| Name | Description |
|---|---|
| frame_a | Coordinate system a |
| frame_b | Coordinate system b |
 Modelica.Mechanics.MultiBody.Sensors.Internal.PartialRelativeBaseSensor
Modelica.Mechanics.MultiBody.Sensors.Internal.PartialRelativeBaseSensorBase class for relative sensor models defined by equations (frame_resolve must be connected exactly once)
Partial base class for relative sensor models defined by equations. The connector frame_resolve is always enabled and must be connected exactly once.
Extends from Modelica.Icons.RoundSensor (Icon representing a round measurement device).
| Name | Description |
|---|---|
| frame_a | Coordinate system a (measurement is between frame_a and frame_b) |
| frame_b | Coordinate system b (measurement is between frame_a and frame_b) |
| frame_resolve | Coordinate system in which vector is optionally resolved |
 Modelica.Mechanics.MultiBody.Sensors.Internal.BasicAbsolutePosition
Modelica.Mechanics.MultiBody.Sensors.Internal.BasicAbsolutePositionBasic sensor to measure absolute position vector
This basic sensor is aimed to be used within advanced sensors where the absolute position vector of the origin of frame_a should be determined. This vector is provided at the output signal connector r.
Via parameter resolveInFrame it is defined in which frame the position vector is resolved:
| resolveInFrame = Types.ResolveInFrameA. | Meaning |
|---|---|
| world | Resolve vector in world frame |
| frame_a | Resolve vector in frame_a |
| frame_resolve | Resolve vector in frame_resolve |
In this basic sensor model, the connector frame_resolve is always enabled and must be connected. If resolveInFrame = Types.ResolveInFrameA.frame_resolve, the vector r is resolved in the frame to which frame_resolve is connected.
If resolveInFrame = Types.ResolveInFrameA.frame_a, the output vector is computed as:
r = MultiBody.Frames.resolve2(frame_a.R, frame_b.r_0);
Extends from Modelica.Mechanics.MultiBody.Sensors.Internal.PartialAbsoluteBaseSensor (Base class for absolute sensor models defined by equations (frame_resolve must be connected exactly once)).
| Name | Description |
|---|---|
| resolveInFrame | Frame in which output vector r is resolved (world, frame_a, or frame_resolve) |
| Name | Description |
|---|---|
| frame_a | Coordinate system from which kinematic quantities are measured |
| frame_resolve | Coordinate system in which output vector(s) is optionally resolved |
| r[3] | Absolute position vector frame_a.r_0 resolved in frame defined by resolveInFrame [m] |
 Modelica.Mechanics.MultiBody.Sensors.Internal.BasicAbsoluteAngularVelocity
Modelica.Mechanics.MultiBody.Sensors.Internal.BasicAbsoluteAngularVelocityBasic sensor to measure absolute angular velocity
This basic sensor is aimed to be used within advanced sensors where the absolute angular velocity of frame_a should be determined. This vector is provided at the output signal connector w.
Via parameter resolveInFrame it is defined, in which frame the angular velocity is resolved:
| resolveInFrame = Types.ResolveInFrameA. | Meaning |
|---|---|
| world | Resolve vector in world frame |
| frame_a | Resolve vector in frame_a |
| frame_resolve | Resolve vector in frame_resolve |
In this basic sensor model, the connector frame_resolve is always enabled and must be connected. If resolveInFrame = Types.ResolveInFrameA.frame_resolve, the vector w is resolved in the frame to which frame_resolve is connected.
If resolveInFrame = Types.ResolveInFrameA.frame_a, the output vector is computed as:
w = MultiBody.Frames.angularVelocity2(frame_a.R);
Extends from Modelica.Mechanics.MultiBody.Sensors.Internal.PartialAbsoluteBaseSensor (Base class for absolute sensor models defined by equations (frame_resolve must be connected exactly once)).
| Name | Description |
|---|---|
| resolveInFrame | Frame in which output vector w is resolved (world, frame_a, or frame_resolve) |
| Name | Description |
|---|---|
| frame_a | Coordinate system from which kinematic quantities are measured |
| frame_resolve | Coordinate system in which output vector(s) is optionally resolved |
| w[3] | Absolute angular velocity vector [rad/s] |
 Modelica.Mechanics.MultiBody.Sensors.Internal.BasicRelativePosition
Modelica.Mechanics.MultiBody.Sensors.Internal.BasicRelativePositionBasic sensor to measure relative position vector
This basic sensor is aimed to be used within advanced sensors where the relative position vector between the origins of frame_a and frame_b should be determined. This vector is provided at the output signal connector r_rel.
Via parameter resolveInFrame it is defined in which frame the position vector is resolved:
| resolveInFrame = Types.ResolveInFrameAB. | Meaning |
|---|---|
| world | Resolve vector in world frame |
| frame_a | Resolve vector in frame_a |
| frame_b | Resolve vector in frame_b |
| frame_resolve | Resolve vector in frame_resolve |
In this basic sensor model, the connector frame_resolve is always enabled and must be connected. If resolveInFrame = Types.ResolveInFrameAB.frame_resolve, the vector r_rel is resolved in the frame to which frame_resolve is connected.
If resolveInFrame = Types.ResolveInFrameAB.frame_a, the output vector is computed as:
r_rel = MultiBody.Frames.resolve2(frame_a.R, frame_b.r_0 - frame_a.r_0);
Extends from Modelica.Mechanics.MultiBody.Sensors.Internal.PartialRelativeBaseSensor (Base class for relative sensor models defined by equations (frame_resolve must be connected exactly once)).
| Name | Description |
|---|---|
| resolveInFrame | Frame in which output vector r_rel is resolved (world, frame_a, frame_b, or frame_resolve) |
| Name | Description |
|---|---|
| frame_a | Coordinate system a (measurement is between frame_a and frame_b) |
| frame_b | Coordinate system b (measurement is between frame_a and frame_b) |
| frame_resolve | Coordinate system in which vector is optionally resolved |
| r_rel[3] | Relative position vector frame_b.r_0 - frame_a.r_0 resolved in frame defined by resolveInFrame [m] |
 Modelica.Mechanics.MultiBody.Sensors.Internal.BasicRelativeAngularVelocity
Modelica.Mechanics.MultiBody.Sensors.Internal.BasicRelativeAngularVelocityBasic sensor to measure relative angular velocity
This basic sensor is aimed to be used within advanced sensors where the relative angular velocity between frame_a and frame_b should be determined. This vector is provided at the output signal connector w_rel.
Via parameter resolveInFrame it is defined, in which frame the angular velocity is resolved:
| resolveInFrame = Types.ResolveInFrameAB. | Meaning |
|---|---|
| world | Resolve vector in world frame |
| frame_a | Resolve vector in frame_a |
| frame_b | Resolve vector in frame_b |
| frame_resolve | Resolve vector in frame_resolve |
In this basic sensor model, the connector frame_resolve is always enabled and must be connected. If resolveInFrame = Types.ResolveInFrameAB.frame_resolve, the vector w_rel is resolved in the frame to which frame_resolve is connected.
If resolveInFrame = Types.ResolveInFrameAB.frame_a, the output vector is computed as:
// Relative orientation object from frame_a to frame_b R_rel = MultiBody.Frames.relativeRotation(frame_a.R, frame_b.R); // Angular velocity resolved in frame_a w_rel = MultiBody.Frames.angularVelocity1(R_rel);
Extends from Modelica.Mechanics.MultiBody.Sensors.Internal.PartialRelativeBaseSensor (Base class for relative sensor models defined by equations (frame_resolve must be connected exactly once)).
| Name | Description |
|---|---|
| resolveInFrame | Frame in which output vector w_rel is resolved (world, frame_a, frame_b, or frame_resolve) |
| Name | Description |
|---|---|
| frame_a | Coordinate system a (measurement is between frame_a and frame_b) |
| frame_b | Coordinate system b (measurement is between frame_a and frame_b) |
| frame_resolve | Coordinate system in which vector is optionally resolved |
| w_rel[3] | Relative angular velocity vector [rad/s] |
 Modelica.Mechanics.MultiBody.Sensors.Internal.BasicTransformAbsoluteVector
Modelica.Mechanics.MultiBody.Sensors.Internal.BasicTransformAbsoluteVectorTransform absolute vector into another frame
This basic sensor transforms an absolute vector r_in, resolved in frame defined by frame_r_in, into another frame specified by frame_r_out. This output vector is provided at the output signal connector r_out.
Via parameters frame_r_in and frame_r_out it is defined in which frame the position vector is resolved:
| resolveInFrame = Types.ResolveInFrameA. | Meaning |
|---|---|
| world | Resolve vector in world frame |
| frame_a | Resolve vector in frame_a |
| frame_resolve | Resolve vector in frame_resolve |
In this basic sensor model, the connector frame_resolve is always enabled and must be connected.
Extends from Modelica.Icons.RoundSensor (Icon representing a round measurement device).
| Name | Description |
|---|---|
| frame_r_in | Frame in which vector r_in is resolved (world, frame_a, or frame_resolve) |
| frame_r_out | Frame in which vector r_out (= r_in in other frame) is resolved (world, frame_a, or frame_resolve) |
| Name | Description |
|---|---|
| frame_a | Coordinate system from which absolute kinematic quantities are measured |
| frame_resolve | Coordinate system in which vector is optionally resolved |
| r_in[3] | Input vector resolved in frame defined by frame_r_in |
| r_out[3] | Input vector r_in resolved in frame defined by frame_r_out |
 Modelica.Mechanics.MultiBody.Sensors.Internal.BasicTransformRelativeVector
Modelica.Mechanics.MultiBody.Sensors.Internal.BasicTransformRelativeVectorTransform relative vector into another frame
This basic sensor transforms a relative vector r_in, resolved in frame defined by frame_r_in, into another frame specified by frame_r_out. This output vector is provided at the output signal connector r_out.
Via parameters frame_r_in and frame_r_out it is defined in which frame the position vector is resolved:
| resolveInFrame = Types.ResolveInFrameAB. | Meaning |
|---|---|
| world | Resolve vector in world frame |
| frame_a | Resolve vector in frame_a |
| frame_b | Resolve vector in frame_b |
| frame_resolve | Resolve vector in frame_resolve |
In this basic sensor model, the connector frame_resolve is always enabled and must be connected.
Extends from Modelica.Mechanics.MultiBody.Sensors.Internal.PartialRelativeBaseSensor (Base class for relative sensor models defined by equations (frame_resolve must be connected exactly once)).
| Name | Description |
|---|---|
| frame_r_in | Frame in which vector r_in is resolved (world, frame_a, frame_b, or frame_resolve) |
| frame_r_out | Frame in which vector r_out (= r_in in other frame) is resolved (world, frame_a, frame_b, or frame_resolve) |
| Name | Description |
|---|---|
| frame_a | Coordinate system a (measurement is between frame_a and frame_b) |
| frame_b | Coordinate system b (measurement is between frame_a and frame_b) |
| frame_resolve | Coordinate system in which vector is optionally resolved |
| r_in[3] | Input vector resolved in frame defined by frame_r_in |
| r_out[3] | Input vector r_in resolved in frame defined by frame_r_out |
 Modelica.Mechanics.MultiBody.Sensors.Internal.PartialCutForceSensor
Modelica.Mechanics.MultiBody.Sensors.Internal.PartialCutForceSensorBase class to measure cut force and/or torque between two frames, defined by components
This is a base class for 3-dim. mechanical components with two frames and one output port in order to measure the cut-force and/or cut-torque acting between the two frames and to provide the measured signals as output for further processing with the blocks of package Modelica.Blocks.
Extends from Modelica.Icons.RoundSensor (Icon representing a round measurement device).
| Name | Description |
|---|---|
| resolveInFrame | Frame in which output vector(s) is/are resolved (world, frame_a, or frame_resolve) |
| Name | Description |
|---|---|
| frame_a | Coordinate system a |
| frame_b | Coordinate system b |
| frame_resolve | Output vectors are optionally resolved in this frame (cut-force/-torque are set to zero) |
Modelica.Mechanics.MultiBody.Sensors.Internal.PartialCutForceBaseSensorBase class to measure cut force and/or torque between two frames, defined by equations (frame_resolve must be connected exactly once)
This is a base class for 3-dim. mechanical components with two frames and one output port in order to measure the cut-force and/or cut-torque acting between the two frames and to provide the measured signals as output for further processing with the blocks of package Modelica.Blocks.
Extends from Modelica.Icons.RoundSensor (Icon representing a round measurement device).
| Name | Description |
|---|---|
| resolveInFrame | Frame in which output vector is resolved (world, frame_a, or frame_resolve) |
| Name | Description |
|---|---|
| frame_a | Coordinate system a |
| frame_b | Coordinate system b |
| frame_resolve | The output vector is optionally resolved in this frame (cut-force/-torque are set to zero) |
 Modelica.Mechanics.MultiBody.Sensors.Internal.BasicCutForce
Modelica.Mechanics.MultiBody.Sensors.Internal.BasicCutForceBasic sensor to measure cut force vector (frame_resolve must be connected)
This basic sensor is aimed to be used within advanced sensors where the cut-force acting between the two frames is determined to which this model is connected. This cut-force is provided at the output signal connector force (= frame_a.f). If parameter positiveSign = false, the negative cut-force is provided (= frame_b.f).
Via parameter resolveInFrame it is defined in which frame the force vector is resolved:
| resolveInFrame = Types.ResolveInFrameA. | Meaning |
|---|---|
| world | Resolve vector in world frame |
| frame_a | Resolve vector in frame_a |
| frame_resolve | Resolve vector in frame_resolve |
In this basic sensor model, the connector frame_resolve is always enabled and must be connected. If resolveInFrame = Types.ResolveInFrameA.frame_resolve, the vector force is resolved in the frame to which frame_resolve is connected.
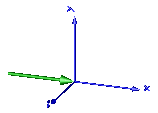
In the following figure the animation of a CutForce sensor is shown. The dark blue coordinate system is frame_b, and the green arrow is the cut force acting at frame_b and with negative sign at frame_a.
Extends from Modelica.Mechanics.MultiBody.Sensors.Internal.PartialCutForceBaseSensor (Base class to measure cut force and/or torque between two frames, defined by equations (frame_resolve must be connected exactly once)).
| Name | Description |
|---|---|
| resolveInFrame | Frame in which output vector is resolved (world, frame_a, or frame_resolve) |
| positiveSign | = true, if force with positive sign is returned (= frame_a.f), otherwise with negative sign (= frame_b.f) |
| Name | Description |
|---|---|
| frame_a | Coordinate system a |
| frame_b | Coordinate system b |
| frame_resolve | The output vector is optionally resolved in this frame (cut-force/-torque are set to zero) |
| force[3] | Cut force resolved in frame defined by resolveInFrame [N] |
 Modelica.Mechanics.MultiBody.Sensors.Internal.BasicCutTorque
Modelica.Mechanics.MultiBody.Sensors.Internal.BasicCutTorqueBasic sensor to measure cut torque vector (frame_resolve must be connected)
This basic sensor is aimed to be used within advanced sensors where the cut-torque acting between the two frames is determined to which this model is connected. This cut-torque is provided at the output signal connector torque (= frame_a.f). If parameter positiveSign = false, the negative cut-torque is provided (= frame_b.f).
Via parameter resolveInFrame it is defined in which frame the torque vector is resolved:
| resolveInFrame = Types.ResolveInFrameA. | Meaning |
|---|---|
| world | Resolve vector in world frame |
| frame_a | Resolve vector in frame_a |
| frame_resolve | Resolve vector in frame_resolve |
In this basic sensor model, the connector frame_resolve is always enabled and must be connected. If resolveInFrame = Types.ResolveInFrameA.frame_resolve, the vector torque is resolved in the frame to which frame_resolve is connected.
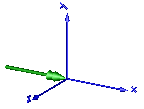
In the following figure the animation of a CutTorque sensor is shown. The dark blue coordinate system is frame_b, and the green arrow is the cut torque acting at frame_b and with negative sign at frame_a.
Extends from Modelica.Mechanics.MultiBody.Sensors.Internal.PartialCutForceBaseSensor (Base class to measure cut force and/or torque between two frames, defined by equations (frame_resolve must be connected exactly once)).
| Name | Description |
|---|---|
| resolveInFrame | Frame in which output vector is resolved (world, frame_a, or frame_resolve) |
| positiveSign | = true, if torque with positive sign is returned (= frame_a.t), otherwise with negative sign (= frame_b.t) |
| Name | Description |
|---|---|
| frame_a | Coordinate system a |
| frame_b | Coordinate system b |
| frame_resolve | The output vector is optionally resolved in this frame (cut-force/-torque are set to zero) |
| torque[3] | Cut torque resolved in frame defined by resolveInFrame [N.m] |