SineGenerate sine signal |
|
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
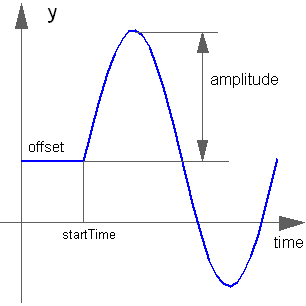
The Real output y is a sine signal:
Parameters (5)
| offset |
Value: 0 Type: Real Description: Offset of output signal y |
|---|---|
| startTime |
Value: 0 Type: Time (s) Description: Output y = offset for time < startTime |
| amplitude |
Value: 1 Type: Real Description: Amplitude of sine wave |
| freqHz |
Value: Type: Frequency (Hz) Description: Frequency of sine wave |
| phase |
Value: 0 Type: Angle (rad) Description: Phase of sine wave |
Connectors (1)
| y |
Type: RealOutput Description: Connector of Real output signal |
|---|
Used in Examples (33)
|
Modelica.Blocks.Examples Demonstrates the construction of an inverse model |
|
|
Modelica.Blocks.Examples Demonstrates the usage of blocks from Modelica.Blocks.Math |
|
|
Modelica.Blocks.Examples Demonstrates the usage of blocks from Modelica.Blocks.MathInteger |
|
|
Modelica.Blocks.Examples Demonstrates the usage of a signal bus |
|
|
Modelica.Electrical.Analog.Examples Example to demonstrate variants to generate FMUs (Functional Mock-up Units) |
|
|
Modelica.Electrical.PowerConverters.Examples.DCAC.MultiPhaseTwoLevel Multi phase DC to AC converter with R load |
|
|
Modelica.Electrical.PowerConverters.Examples.DCAC.MultiPhaseTwoLevel Multi phase DC to AC converter with R-L load |
|
|
Modelica.Electrical.PowerConverters.Examples.DCAC.MultiPhaseTwoLevel Test of pulse width modulation methods |
|
|
Modelica.Mechanics.MultiBody.Examples.Elementary Rolling wheel set that is driven by torques driving the wheels |
|
|
Modelica.Mechanics.MultiBody.Examples.Elementary Demonstrate the visualization of a sine surface, as well as a torus and a wheel constructed from a surface |
|
|
Modelica.Mechanics.MultiBody.Examples.Loops Mechanism with three planar kinematic loops and one degree-of-freedom with analytic loop handling (with JointRRR joints) |
|
|
Modelica.Mechanics.MultiBody.Examples.Rotational3DEffects Demonstrates usage of models Rotor1D and Mounting1D |
|
|
Modelica.Mechanics.MultiBody.Examples.Rotational3DEffects Demonstrates usage of model Rotor1D mounted on a moving body |
|
|
Modelica.Mechanics.MultiBody.Examples.Rotational3DEffects Demonstrate usage of GearConstraint model |
|
|
Modelica.Mechanics.MultiBody.Examples.Rotational3DEffects Demonstrates the usage of a BevelGear1D model and how to calculate the power of such an element |
|
|
Modelica.Mechanics.Rotational.Examples First example: simple drive train |
|
|
Modelica.Mechanics.Rotational.Examples First example: simple drive train with grounded elements |
|
|
Modelica.Mechanics.Rotational.Examples Drive train with clutch and brake |
|
|
Modelica.Mechanics.Rotational.Examples Drive train with 3 dynamically coupled clutches |
|
|
Modelica.Mechanics.Rotational.Examples Example to show that gear efficiency may lead to stuck motion |
|
|
Modelica.Mechanics.Rotational.Examples Example to show combination of LossyGear and BearingFriction |
|
|
Modelica.Mechanics.Rotational.Examples Demonstrate the modeling of heat losses |
|
|
Modelica.Mechanics.Rotational.Examples Example to demonstrate variants to generate FMUs (Functional Mock-up Units) |
|
|
Modelica.Mechanics.Rotational.Examples Drive train with actively engaged one-way clutch |
|
|
Modelica.Mechanics.Rotational.Examples Drive train with disengaged one-way clutch |
|
|
Modelica.Mechanics.Translational.Examples Oscillator demonstrates the use of initial conditions |
|
|
Modelica.Mechanics.Translational.Examples Sensors for translational systems |
|
|
Modelica.Mechanics.Translational.Examples Use of model Stop |
|
|
Modelica.Mechanics.Translational.Examples Preload of a spool using ElastoGap models |
|
|
Modelica.Mechanics.Translational.Examples Demonstrate the modeling of heat losses |
|
|
Modelica.Mechanics.Translational.Examples Example to demonstrate variants to generate FMUs (Functional Mock-up Units) |
|
|
Modelica.Fluid.Examples.Explanatory Differences between using one port with and without explicit junction model and two port sensors for fluid temperature measuring |
|
|
Modelica.Thermal.HeatTransfer.Examples Example to demonstrate variants to generate FMUs (Functional Mock-up Units) |
Used in Components (2)
|
Modelica.Blocks.Math Calculate harmonic over period 1/f |
|
|
Modelica.Electrical.PowerConverters.Examples.DCAC.ExampleTemplates Single phase two level inverter including control |