CutForceMeasure cut force vector |
|
Diagram

Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
The cut-force acting between the two frames to which this model is connected, is determined and provided at the output signal connector force (= frame_a.f). If parameter positiveSign = false, the negative cut-force is provided (= frame_b.f).
Via parameter resolveInFrame it is defined, in which frame the force vector is resolved:
| resolveInFrame = Types.ResolveInFrameA. | Meaning |
|---|---|
| world | Resolve vector in world frame |
| frame_a | Resolve vector in frame_a |
| frame_resolve | Resolve vector in frame_resolve |
If resolveInFrame = Types.ResolveInFrameAB.frame_resolve, the conditional connector "frame_resolve" is enabled and output force is resolved in the frame, to which frame_resolve is connected. Note, if this connector is enabled, it must be connected.
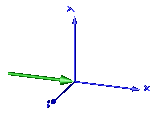
In the following figure the animation of a CutForce sensor is shown. The dark blue coordinate system is frame_b, and the green arrow is the cut force acting at frame_b and with negative sign at frame_a.
Parameters (3)
| resolveInFrame |
Value: Modelica.Mechanics.MultiBody.Types.ResolveInFrameA.frame_a Type: ResolveInFrameA Description: Frame in which output vector(s) is/are resolved (world, frame_a, or frame_resolve) |
|---|---|
| animation |
Value: true Type: Boolean Description: = true, if animation shall be enabled (show arrow) |
| positiveSign |
Value: true Type: Boolean Description: = true, if force with positive sign is returned (= frame_a.f), otherwise with negative sign (= frame_b.f) |
Inputs (4)
| N_to_m |
Default Value: 1000 Type: Real (N/m) Description: Force arrow scaling (length = force/N_to_m) |
|---|---|
| forceDiameter |
Default Value: world.defaultArrowDiameter Type: Diameter (m) Description: Diameter of force arrow |
| forceColor |
Default Value: Modelica.Mechanics.MultiBody.Types.Defaults.ForceColor Type: Color Description: Color of force arrow |
| specularCoefficient |
Default Value: world.defaultSpecularCoefficient Type: SpecularCoefficient Description: Reflection of ambient light (= 0: light is completely absorbed) |
Connectors (4)
| frame_a |
Type: Frame_a Description: Coordinate system a |
|
|---|---|---|
| frame_b |
Type: Frame_b Description: Coordinate system b |
|
| frame_resolve |
Type: Frame_resolve Description: Output vectors are optionally resolved in this frame (cut-force/-torque are set to zero) |
|
| force |
Type: RealOutput[3] Description: Cut force resolved in frame defined by resolveInFrame |
Components (4)
| world |
Type: World |
|
|---|---|---|
| forceArrow |
Type: Arrow |
|
| cutForce |
Type: BasicCutForce |
|
| zeroPosition |
Type: ZeroPosition |