SubClockedDrive with clocked cascade controller where clocks are defined with sub-sampling and partitions with super-sampling |
|
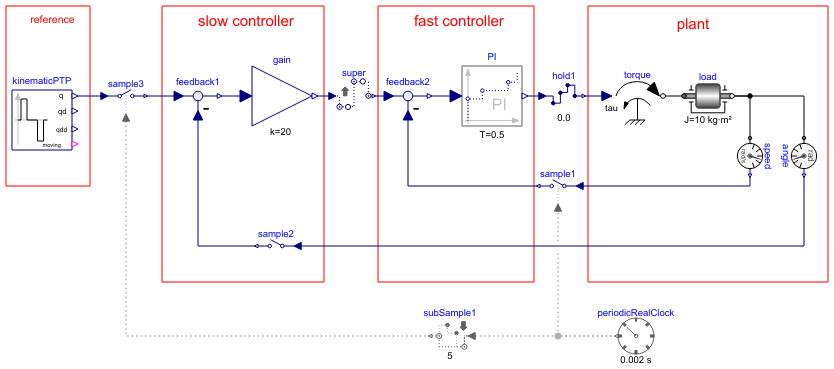
Diagram
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Cascade control drive with discrete-time controller where one periodic clock is defined, the second periodic clock is derived by sub-sampling of the first clock, and both clocks are associated to the corresponding controller partitions. The super-sampling factor of block "super" is derived by clock inference.
Components (16)
| load |
Type: Inertia |
|
|---|---|---|
| speed |
Type: SpeedSensor |
|
| PI |
Type: PI |
|
| feedback2 |
Type: Feedback |
|
| torque |
Type: Torque |
|
| angle |
Type: AngleSensor |
|
| kinematicPTP |
Type: KinematicPTP2 |
|
| feedback1 |
Type: Feedback |
|
| gain |
Type: Gain |
|
| sample1 |
Type: SampleClocked |
|
| sample2 |
Type: Sample |
|
| hold1 |
Type: Hold |
|
| sample3 |
Type: SampleClocked |
|
| super |
Type: SuperSample |
|
| subSample1 |
Type: SubSample |
|
| periodicRealClock |
Type: PeriodicRealClock |