SampleClockedSample the continuous-time, Real input signal and provide it as clocked output signal. The clock is provided as input signal |
|
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
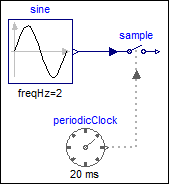
This block is similar to the Sample block. The only difference is that a clock signal is provided via a second input and the output is associated to this clock.
Note, it does not make much sense to vectorize this block, because then also the clock input is vectorized. Instead, if the input signal is a vector, use block SampleVectorizedAndClocked that has a vector Real input and output, as well as a scalar clock input.
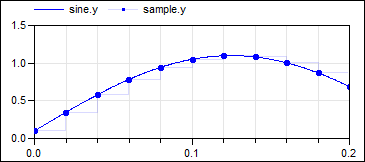
Example
The following
example
samples a sine signal with a periodic clock of 20 ms period:
 |
 |
|
| model | simulation result |
Connectors (3)
| u |
Type: RealInput Description: Connector of continuous-time, Real input signal |
|
|---|---|---|
| y |
Type: RealOutput Description: Connector of clocked, Real output signal |
|
| clock |
Type: ClockInput Description: Output signal y is associated with this clock input |
Used in Examples (31)
|
ClockedWithDiscreteTextbookController Modelica.Clocked.Examples.SimpleControlledDrive Simple controlled drive with discrete textbook controller (period is not used in the controller) |
|
|
Modelica.Clocked.Examples.SimpleControlledDrive Simple controlled drive with discrete controller (period is used in the controller) |
|
|
ExactlyClockedWithDiscreteController Modelica.Clocked.Examples.SimpleControlledDrive Simple controlled drive with discrete controller and exact periodic clocks (period is used in the controller) |
|
|
ClockedWithDiscretizedContinuousController Modelica.Clocked.Examples.SimpleControlledDrive Simple controlled drive with discretized continuous-time controller |
|
|
Modelica.Clocked.Examples.CascadeControlledDrive Drive with clocked cascade controller where clocks are defined with sub-sampling and partitions with super-sampling |
|
|
Modelica.Clocked.Examples.CascadeControlledDrive Drive with clocked cascade controller where fastest partition is defined with a clock and slower partition is defined with super-sampling |
|
|
Modelica.Clocked.Examples.CascadeControlledDrive Drive with clocked cascade controller where all partitions are defined with exact (integer) clock that need to be compatible to each other |
|
|
Modelica.Clocked.Examples.Systems Simple example of a mixing unit where a (discretized) nonlinear inverse plant model is used as feedforward controller |
|
|
Modelica.Clocked.Examples.Systems Closed-loop throttle control synchronized to the crankshaft angle of an internal combustion engine |
|
|
Modelica.Clocked.Examples.Elementary.ClockSignals Example of a SubSample block for Clock signals |
|
|
Modelica.Clocked.Examples.Elementary.ClockSignals Example of a SuperSample block for Clock signals |
|
|
Modelica.Clocked.Examples.Elementary.ClockSignals Example of a ShiftSample block for Clock signals |
|
|
Modelica.Clocked.Examples.Elementary.ClockSignals Simple example of a rotational clock with variable trigger interval and switching rotation-direction. |
|
|
Modelica.Clocked.Examples.Elementary.ClockSignals Simple example of conjunctive and disjunctive logical clocks, combining clock signals to derive new event driven clocks. |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of a Sample block for Real signals with direct feed-through in the continuous-time and the clocked partition |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of a SampleClocked block for Real signals |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of a Hold block for Real signals |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of a HoldWithDAeffects block for Real signals |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of a HoldWithDAeffects block for Real signals (with a computational delay of one sample period) |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of a SubSample block for Real signals |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of a SuperSample block for Real signals |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of a SuperSampleInterpolated block for Real signals |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of a ShiftSample block for Real signals |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of a BackSample block for Real signals |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of an UpSample block for Real signals |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of an UpSample block for Real signals combined with FIR filter blocks |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of an AssignClockToTriggerHold block for Real signals |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of an AssignClockToSquareWaveHold block for Real signals |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of a UniformNoise block for Real signals |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of a UniformNoiseXorshift64star block for Real signals |
|
|
Modelica.Clocked.Examples.Elementary.RealSignals Example of a FractionalDelay block for Real signals |
Used in Components (3)
|
Modelica.Clocked.Examples.Systems.Utilities.ComponentsThrottleControl Integrates the air mass flow into a cylinder. After the charge for one cylinder is complete, resets the mass to 0. |
|
|
Modelica.Clocked.Examples.Systems.Utilities.ComponentsThrottleControl Accounts for the induction-to-power stroke lag. |
|
|
Modelica.Clocked.ClockSignals.Clocks.Rotational Event clock generating a clock tick each time an observed input angle changed for a rotational-interval given as variable input |