ClockedWithDiscretizedContinuousControllerSimple controlled drive with discretized continuous-time controller |
|
Diagram
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
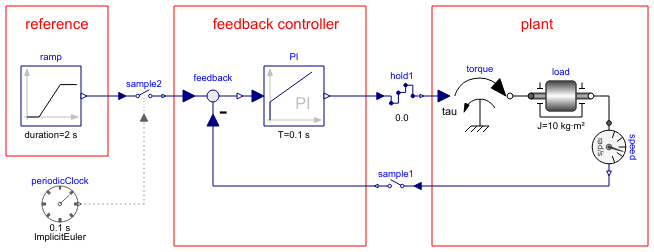
Simple controlled drive with discrete-time controller modelled as a clocked partition. The PI controller is defined with a continuous-time block. The clocked partition is automatically discretized with an implicit Euler method by setting parameter useSolver = true in the Advanced menu of block periodicClock and then selecting ImplicitEuler as SolverMethod for the partition.
Components (10)
| load |
Type: Inertia |
|
|---|---|---|
| speed |
Type: SpeedSensor |
|
| ramp |
Type: Ramp |
|
| feedback |
Type: Feedback |
|
| torque |
Type: Torque |
|
| sample2 |
Type: SampleClocked |
|
| hold1 |
Type: Hold |
|
| sample1 |
Type: Sample |
|
| PI |
Type: PI |
|
| periodicClock |
Type: PeriodicRealClock |