ControllerP-PI cascade controller for one axis |
|
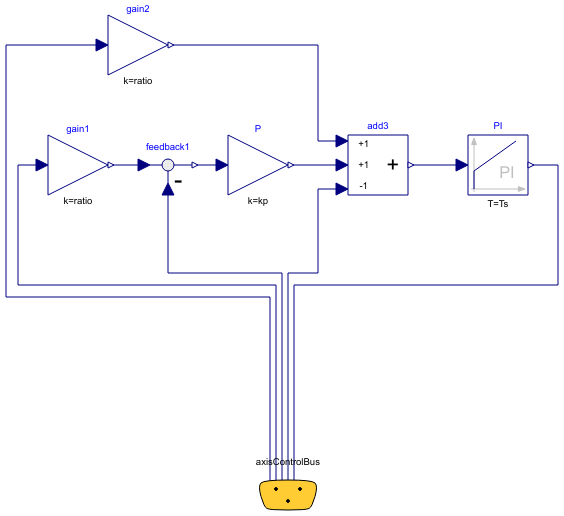
Diagram
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
This controller has an inner PI-controller to control the motor speed, and an outer P-controller to control the motor position of one axis. The reference signals are with respect to the gear-output, and the gear ratio is used in the controller to determine the motor reference signals. All signals are communicated via the "axisControlBus".
Parameters (4)
| kp |
Value: 10 Type: Real Description: Gain of position controller |
|---|---|
| ks |
Value: 1 Type: Real Description: Gain of speed controller |
| Ts |
Value: 0.01 Type: Time (s) Description: Time constant of integrator of speed controller |
| ratio |
Value: 1 Type: Real Description: Gear ratio of gearbox |
Connectors (1)
| axisControlBus |
Type: AxisControlBus |
|---|
Components (6)
Used in Components (1)
|
Modelica.Mechanics.MultiBody.Examples.Systems.RobotR3.Utilities Axis model of the r3 joints 4,5,6 |