StepGenerate step signal of type Real |
|
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
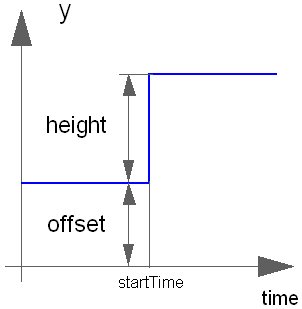
The Real output y is a step signal:
Parameters (3)
| offset |
Value: 0 Type: Real Description: Offset of output signal y |
|---|---|
| startTime |
Value: 0 Type: Time (s) Description: Output y = offset for time < startTime |
| height |
Value: 1 Type: Real Description: Height of step |
Connectors (1)
| y |
Type: RealOutput Description: Connector of Real output signal |
|---|
Used in Examples (16)
|
Modelica.Blocks.Examples Demonstrates the Continuous.Filter block with various options |
|
|
Modelica.Blocks.Examples Demonstrates the use of low pass filters to determine derivatives of filters |
|
|
Modelica.Blocks.Examples Demonstrates to use the rise time instead of the cut-off frequency to define a filter |
|
|
Modelica.Blocks.Examples Demonstrate usage of Nonlinear.SlewRateLimiter |
|
|
Modelica.Blocks.Examples Demonstrates the usage of blocks from Modelica.Blocks.Math |
|
|
Modelica.Blocks.Examples.NoiseExamples Demonstrates how to model measurement noise in an actuator |
|
|
Modelica.Electrical.Machines.Examples.DCMachines Test example: DC with permanent magnet starting with current controller |
|
|
Modelica.Electrical.Machines.Examples.ControlledDCDrives Current controlled DC PM drive with H-bridge from battery |
|
|
Modelica.Electrical.Machines.Examples.ControlledDCDrives Speed controlled DC PM drive with H-bridge from battery |
|
|
Modelica.Mechanics.Rotational.Examples Drive train with clutch and brake |
|
|
Modelica.Mechanics.Rotational.Examples Drive train with 3 dynamically coupled clutches |
|
|
Modelica.Mechanics.Rotational.Examples Example that failed in the previous version of the LossyGear version |
|
|
Modelica.Mechanics.Translational.Examples Demonstrate braking of a translational moving mass |
|
|
Modelica.Fluid.Examples Model of a pumping system for drinking water |
|
|
Modelica.Fluid.Examples Simple model of a heating system |
|
|
Modelica.Fluid.Examples Multi-way connections of pipes and incompressible medium model |