Engine1bModel of one cylinder engine with gas force and preparation for assembly joint JointRRP |
|
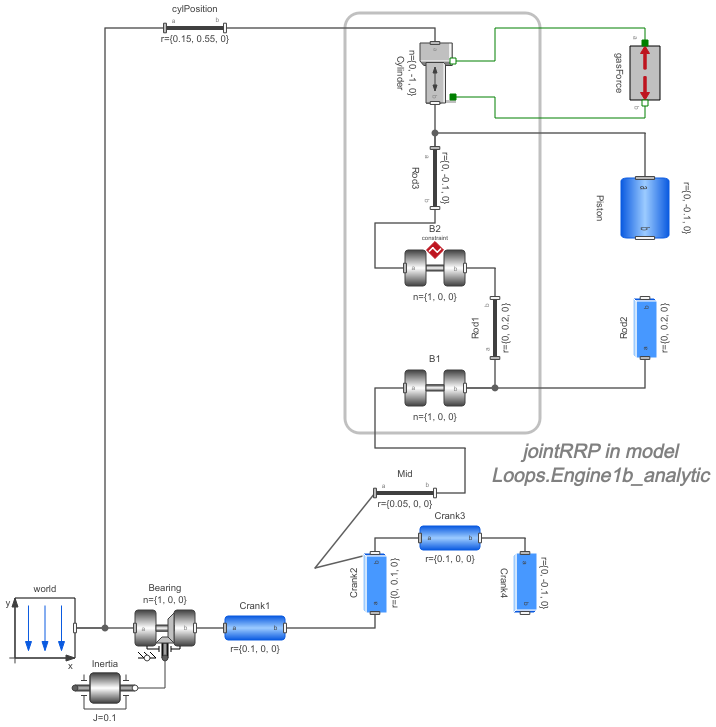
Diagram
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
This is a model of the mechanical part of one cylinder of an engine. It is similar to Loops.Engine1a. The difference is that a simple model for the gas force in the cylinder is added and that the model is restructured in such a way, that the central part of the planar kinematic loop can be easily replaced by the assembly joint "Modelica.Mechanics.MultiBody.Joints.Assemblies.JointRRP". This exchange of the kinematic loop is shown in Loops.Engine1b_analytic. The advantage of using JointRRP is, that the non-linear algebraic equation of this loop is solved analytically, and not numerically as in this model (Engine1b).
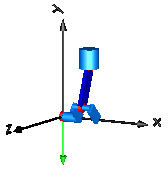
An animation of this example is shown in the figure below.
Components (17)
| Piston |
Type: BodyCylinder |
|
|---|---|---|
| Rod2 |
Type: BodyBox |
|
| Bearing |
Type: Revolute |
|
| world |
Type: World |
|
| Inertia |
Type: Inertia |
|
| Crank4 |
Type: BodyBox |
|
| Crank3 |
Type: BodyCylinder |
|
| Crank1 |
Type: BodyCylinder |
|
| Crank2 |
Type: BodyBox |
|
| Mid |
Type: FixedTranslation |
|
| cylPosition |
Type: FixedTranslation |
|
| gasForce |
Type: GasForce2 |
|
| B2 | ||
| B1 |
Type: Revolute |
|
| Cylinder |
Type: Prismatic |
|
| Rod1 |
Type: FixedTranslation |
|
| Rod3 |
Type: FixedTranslation |