AssembliesComponents that aggregate several joints for analytic loop handling |
|
Package Contents
|
Universal - prismatic - spherical joint aggregation (no constraints, no potential states) |
|
|
Universal - spherical - revolute joint aggregation (no constraints, no potential states) |
|
|
Universal - spherical - prismatic joint aggregation (no constraints, no potential states) |
|
|
Spherical - spherical - revolute joint aggregation with mass (no constraints, no potential states) |
|
|
Spherical - spherical - prismatic joint aggregation with mass (no constraints, no potential states) |
|
|
Planar revolute - revolute - revolute joint aggregation (no constraints, no potential states) |
|
|
Planar revolute - revolute - prismatic joint aggregation (no constraints, no potential states) |
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
The joints in this package are mainly designed to be used in kinematic loop structures. Every component consists of 3 elementary joints. These joints are combined in such a way that the kinematics of the 3 joints between frame_a and frame_b are computed from the movement of frame_a and frame_b, i.e., there are no constraints between frame_a and frame_b. This requires to solve a non-linear system of equations which is performed analytically (i.e., when a mathematical solution exists, it is computed efficiently and reliably). A detailed description how to use these joints is provided in MultiBody.UsersGuide.Tutorial.LoopStructures.AnalyticLoopHandling.
The assembly joints in this package are named JointXYZ where XYZ are the first letters of the elementary joints used in the component, in particular:
| P | Prismatic joint |
| R | Revolute joint |
| S | Spherical joint |
| U | Universal joint |
For example, JointUSR is an assembly joint consisting of a universal, a spherical and a revolute joint.
This package contains the following models:
Content
| Model | Description |
|---|---|
| JointUPS | Universal - prismatic - spherical joint aggregation
|
| JointUSR | Universal - spherical - revolute joint aggregation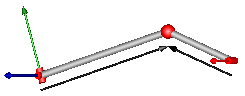
|
| JointUSP | Universal - spherical - prismatic joint aggregation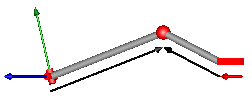
|
| JointSSR | Spherical - spherical - revolute joint aggregation
with an optional mass point at the rod connecting
the two spherical joints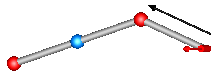
|
| JointSSP | Spherical - spherical - prismatic joint aggregation
with an optional mass point at the rod connecting
the two spherical joints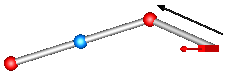
|
| JointRRR | Revolute - revolute - revolute joint aggregation for planar loops
|
| JointRRP | Revolute - revolute - prismatic joint aggregation for planar loops
|
Note, no component of this package has potential states, since the components are designed in such a way that the generalized coordinates of the used elementary joints are computed from the frame_a and frame_b coordinates. Still, it is possible to use the components in a tree structure. In this case states are selected from bodies that are connected to the frame_a or frame_b side of the component. In most cases this gives a less efficient solution, as if elementary joints of package Modelica.Mechanics.MultiBody.Joints would be used directly.
The analytic handling of kinematic loops by using joint aggregations with 6 degrees of freedom as provided in this package, is a new methodology. It is based on a more general method for solving non-linear equations of kinematic loops developed by Woernle and Hiller. An automatic application of this more general method is difficult, and a manual application is only suited for specialists in this field. The method introduced here is a compromise: It can be quite easily applied by an end user, but for a smaller class of kinematic loops. The method of the "characteristic pair of joints" from Woernle and Hiller is described in:
- Woernle C.:
- Ein systematisches Verfahren zur Aufstellung der geometrischen
Schliessbedingungen in kinematischen Schleifen mit Anwendung
bei der Rückwärtstransformation für
Industrieroboter.
Fortschritt-Berichte VDI, Reihe 18, Nr. 59, Duesseldorf: VDI-Verlag 1988, ISBN 3-18-145918-6.
- Hiller M., and Woernle C.:
- A Systematic Approach for Solving the Inverse Kinematic
Problem of Robot Manipulators.
Proceedings 7th World Congress Th. Mach. Mech., Sevilla 1987.