JointsComponents that constrain the motion between two frames |
|
Package Contents
|
Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
|
Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
|
Revolute joint that is described by 2 positional constraints for usage in a planar loop (the ambiguous cut-force perpendicular to the loop and the ambiguous cut-torques are set arbitrarily to zero) |
|
|
Cylindrical joint (2 degrees-of-freedom, 4 potential states) |
|
|
Universal joint (2 degrees-of-freedom, 4 potential states) |
|
|
Planar joint (3 degrees-of-freedom, 6 potential states) |
|
|
Spherical joint (3 constraints and no potential states, or 3 degrees-of-freedom and 3 states) |
|
|
Free motion joint (6 degrees-of-freedom, 12 potential states) |
|
|
Free motion joint with scalar initialization and state selection (6 degrees-of-freedom, 12 potential states) |
|
|
Spherical - spherical joint aggregation (1 constraint, no potential states) with an optional point mass in the middle |
|
|
Universal - spherical joint aggregation (1 constraint, no potential states) |
|
|
Ideal 3-dim. gearbox (arbitrary shaft directions) |
|
|
Joint (no mass, no inertia) that describes an ideal rolling wheel (rolling on the plane z=0) |
|
|
Joint (no mass, no inertia) that describes an ideal rolling wheel set (two ideal rolling wheels connected together by an axis) |
|
|
Components that aggregate several joints for analytic loop handling |
|
|
Components that define joints by constraints |
|
|
Components used for analytic solution of kinematic loops (use only if you know what you are doing) |
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
This package contains joint components, that is, idealized, massless elements that constrain the motion between frames. In subpackage Assemblies aggregation joint components are provided to handle kinematic loops analytically (this means that non-linear systems of equations occurring in these joint aggregations are analytically solved, i.e., robustly and efficiently).
Content
| Model | Description |
|---|---|
| Prismatic | Prismatic joint and actuated prismatic joint
(1 translational degree-of-freedom, 2 potential states)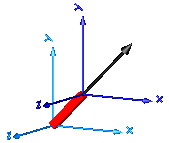
|
| Revolute | Revolute and actuated revolute joint
(1 rotational degree-of-freedom, 2 potential states)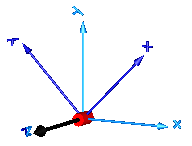
|
| Cylindrical | Cylindrical joint (2 degrees-of-freedom, 4 potential states)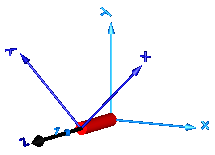
|
| Universal | Universal joint (2 degrees-of-freedom, 4 potential states)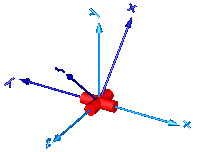
|
| Planar | Planar joint (3 degrees-of-freedom, 6 potential states)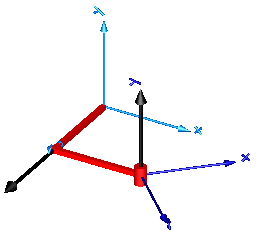
|
| Spherical | Spherical joint (3 constraints and no potential states, or 3 degrees-of-freedom and 3 states)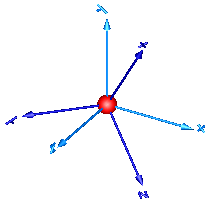
|
| FreeMotion | Free motion joint (6 degrees-of-freedom, 12 potential states)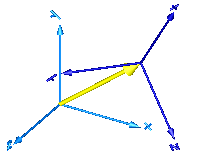
|
| SphericalSpherical | Spherical - spherical joint aggregation (1 constraint,
no potential states) with an optional point mass in the middle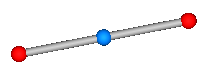
|
| UniversalSpherical | Universal - spherical joint aggregation (1 constraint, no potential states)
|
| GearConstraint | Ideal 3-dim. gearbox (arbitrary shaft directions) |
| MultiBody.Joints.Assemblies | Package of joint aggregations for analytic loop handling. |
| MultiBody.Joints.Constraints | Package of components that define joints by constraints |