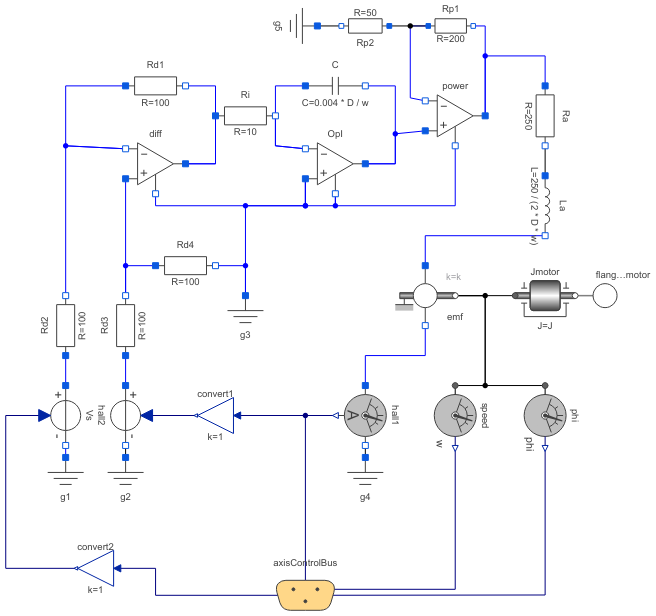
MotorMotor model including current controller of r3 motors |
|
Diagram
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Default values are given for the motor of joint 1. The input of the motor is the desired current (the actual current is proportional to the torque produced by the motor).
Parameters (6)
| J |
Value: 0.0013 Type: Inertia (kg·m²) Description: Moment of inertia of motor |
|---|---|
| k |
Value: 1.1616 Type: Real Description: Gain of motor |
| w |
Value: 4590 Type: Real Description: Time constant of motor |
| D |
Value: 0.6 Type: Real Description: Damping constant of motor |
| w_max |
Value: 315 Type: AngularVelocity (rad/s) Description: Maximum speed of motor |
| i_max |
Value: 9 Type: Current (A) Description: Maximum current of motor |
Connectors (2)
| flange_motor |
Type: Flange_b |
|
|---|---|---|
| axisControlBus |
Type: AxisControlBus |
Components (27)
| Vs |
Type: SignalVoltage |
|
|---|---|---|
| power |
Type: IdealOpAmp |
|
| diff |
Type: IdealOpAmp |
|
| emf |
Type: EMF |
|
| La |
Type: Inductor |
|
| Ra |
Type: Resistor |
|
| Rd2 |
Type: Resistor |
|
| C |
Type: Capacitor |
|
| OpI |
Type: IdealOpAmp |
|
| Ri |
Type: Resistor |
|
| Rd1 |
Type: Resistor |
|
| Rp1 |
Type: Resistor |
|
| Rp2 |
Type: Resistor |
|
| Rd4 |
Type: Resistor |
|
| hall2 |
Type: SignalVoltage |
|
| Rd3 |
Type: Resistor |
|
| g1 |
Type: Ground |
|
| g2 |
Type: Ground |
|
| g3 |
Type: Ground |
|
| hall1 |
Type: CurrentSensor |
|
| g4 |
Type: Ground |
|
| g5 |
Type: Ground |
|
| phi |
Type: AngleSensor |
|
| speed |
Type: SpeedSensor |
|
| Jmotor |
Type: Inertia |
|
| convert1 |
Type: Gain |
|
| convert2 |
Type: Gain |
Used in Components (1)
|
Modelica.Mechanics.MultiBody.Examples.Systems.RobotR3.Components Axis model of the r3 joints 4,5,6 |