AIM_SquirrelCageAsynchronous induction machine with squirrel cage rotor |
|
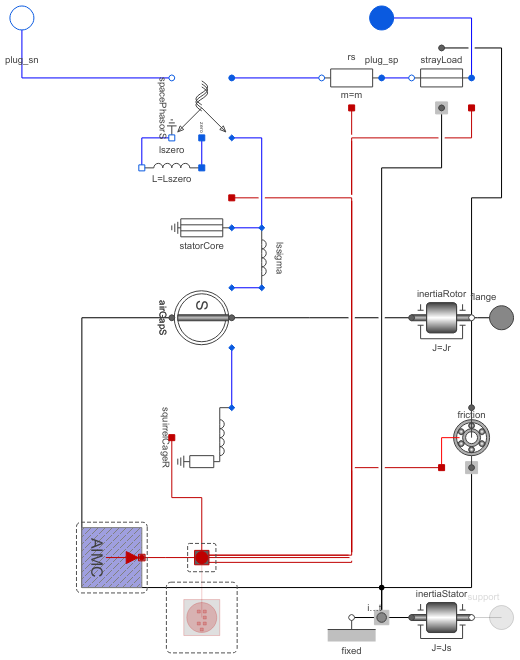
Diagram
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Model of a three phase asynchronous induction machine with squirrel cage.
Resistance and stray inductance of stator is modeled directly in stator phases, then using space phasor transformation. Resistance and stray inductance of rotor's squirrel cage is modeled in two axis of the rotor-fixed coordinate system. Both together connected via a stator-fixed AirGap model. The machine models take the following loss effects into account:
- heat losses in the temperature dependent stator winding resistances
- heat losses in the temperature dependent cage resistances
- friction losses
- core losses (only eddy current losses, no hysteresis losses)
- stray load losses
Default values for machine's parameters (a realistic example) are:
| number of pole pairs p | 2 | |
| stator's moment of inertia | 0.29 | kg.m2 |
| rotor's moment of inertia | 0.29 | kg.m2 |
| nominal frequency fNominal | 50 | Hz |
| nominal voltage per phase | 100 | V RMS |
| nominal current per phase | 100 | A RMS |
| nominal torque | 161.4 | Nm |
| nominal speed | 1440.45 | rpm |
| nominal mechanical output | 24.346 | kW |
| efficiency | 92.7 | % |
| power factor | 0.875 | |
| stator resistance | 0.03 | Ohm per phase at reference temperature |
| reference temperature TsRef | 20 | °C |
| temperature coefficient alpha20s | 0 | 1/K |
| rotor resistance | 0.04 | Ohm at reference temperature |
| reference temperature TrRef | 20 | °C |
| temperature coefficient alpha20r | 0 | 1/K |
| stator reactance Xs | 3 | Ohm per phase |
| rotor reactance Xr | 3 | Ohm |
| total stray coefficient sigma | 0.0667 | |
| stator operational temperature TsOperational | 20 | °C |
| rotor operational temperature TrOperational | 20 | °C |
| These values give the following inductances: | ||
| stator stray inductance per phase | Xs * (1 - sqrt(1-sigma))/(2*pi*fNominal) | |
| rotor stray inductance | Xr * (1 - sqrt(1-sigma))/(2*pi*fNominal) | |
| main field inductance per phase | sqrt(Xs*Xr * (1-sigma))/(2*pi*fNominal) |
Parameters (21)
| Jr |
Value: Type: Inertia (kg·m²) Description: Rotor's moment of inertia |
|---|---|
| useSupport |
Value: false Type: Boolean Description: Enable / disable (=fixed stator) support |
| Js |
Value: Jr Type: Inertia (kg·m²) Description: Stator's moment of inertia |
| useThermalPort |
Value: false Type: Boolean Description: Enable / disable (=fixed temperatures) thermal port |
| frictionParameters |
Value: Type: FrictionParameters Description: Friction loss parameter record |
| p |
Value: Type: Integer Description: Number of pole pairs (Integer) |
| fsNominal |
Value: Type: Frequency (Hz) Description: Nominal frequency |
| TsOperational |
Value: Type: Temperature (K) Description: Operational temperature of stator resistance |
| Rs |
Value: Type: Resistance (Ω) Description: Stator resistance per phase at TRef |
| TsRef |
Value: Type: Temperature (K) Description: Reference temperature of stator resistance |
| alpha20s |
Value: Type: LinearTemperatureCoefficient20 (¹/K) Description: Temperature coefficient of stator resistance at 20 degC |
| Lszero |
Value: Lssigma Type: Inductance (H) Description: Stator zero sequence inductance |
| Lssigma |
Value: Type: Inductance (H) Description: Stator stray inductance per phase |
| statorCoreParameters |
Value: Type: CoreParameters Description: Stator core loss parameter record; all parameters refer to stator side |
| strayLoadParameters |
Value: Type: StrayLoadParameters Description: Stray load loss parameter record |
| Lm |
Value: Type: Inductance (H) Description: Stator main field inductance per phase |
| Lrsigma |
Value: Type: Inductance (H) Description: Rotor stray inductance per phase (equivalent three phase winding) |
| Rr |
Value: Type: Resistance (Ω) Description: Rotor resistance per phase (equivalent three phase winding) at TRef |
| TrRef |
Value: Type: Temperature (K) Description: Reference temperature of rotor resistance |
| alpha20r |
Value: Type: LinearTemperatureCoefficient20 (¹/K) Description: Temperature coefficient of rotor resistance at 20 degC |
| TrOperational |
Value: Type: Temperature (K) Description: Operational temperature of rotor resistance |
Inputs (4)
| idq_ss |
Default Value: airGapS.i_ss Type: Current[2] (A) Description: Stator space phasor current / stator fixed frame |
|---|---|
| idq_sr |
Default Value: airGapS.i_sr Type: Current[2] (A) Description: Stator space phasor current / rotor fixed frame |
| idq_rs |
Default Value: airGapS.i_rs Type: Current[2] (A) Description: Rotor space phasor current / stator fixed frame |
| idq_rr |
Default Value: airGapS.i_rr Type: Current[2] (A) Description: Rotor space phasor current / rotor fixed frame |
Outputs (9)
| phiMechanical |
Default Value: flange.phi - internalSupport.phi Type: Angle (rad) Description: Mechanical angle of rotor against stator |
|---|---|
| wMechanical |
Default Value: der(phiMechanical) Type: AngularVelocity (rad/s) Description: Mechanical angular velocity of rotor against stator |
| tauElectrical |
Default Value: inertiaRotor.flange_a.tau Type: Torque (N·m) Description: Electromagnetic torque |
| tauShaft |
Default Value: -flange.tau Type: Torque (N·m) Description: Shaft torque |
| powerBalance |
Type: PowerBalanceAIMC Description: Power balance |
| vs |
Default Value: plug_sp.pin.v - plug_sn.pin.v Type: Voltage[m] (V) Description: Stator instantaneous voltages |
| is |
Default Value: plug_sp.pin.i Type: Current[m] (A) Description: Stator instantaneous currents |
| i_0_s |
Default Value: spacePhasorS.zero.i Type: Current (A) Description: Stator zero-sequence current |
| ir |
Default Value: squirrelCageR.i Type: Current[2] (A) Description: Rotor cage currents |
Connectors (5)
| flange |
Type: Flange_a Description: Shaft |
|
|---|---|---|
| support |
Type: Flange_a Description: Support at which the reaction torque is acting |
|
| plug_sp |
Type: PositivePlug Description: Positive stator plug |
|
| plug_sn |
Type: NegativePlug Description: Negative stator plug |
|
| thermalPort |
Type: ThermalPortAIMC |
Components (17)
| frictionParameters |
Type: FrictionParameters Description: Friction loss parameter record |
|
|---|---|---|
| inertiaRotor |
Type: Inertia |
|
| inertiaStator |
Type: Inertia |
|
| fixed |
Type: Fixed |
|
| friction |
Type: Friction |
|
| statorCoreParameters |
Type: CoreParameters Description: Stator core loss parameter record; all parameters refer to stator side |
|
| strayLoadParameters |
Type: StrayLoadParameters Description: Stray load loss parameter record |
|
| powerBalance |
Type: PowerBalanceAIMC Description: Power balance |
|
| rs |
Type: Resistor |
|
| lssigma |
Type: Inductor |
|
| lszero |
Type: Inductor |
|
| statorCore |
Type: Core |
|
| spacePhasorS |
Type: SpacePhasor |
|
| strayLoad |
Type: StrayLoad |
|
| thermalAmbient |
Type: ThermalAmbientAIMC |
|
| airGapS |
Type: AirGapS |
|
| squirrelCageR |
Type: SquirrelCage |
Used in Examples (10)
|
Modelica.Electrical.Machines.Examples.AsynchronousInductionMachines Test example: AsynchronousInductionMachineSquirrelCage direct-on-line |
|
|
Modelica.Electrical.Machines.Examples.AsynchronousInductionMachines Test example: AsynchronousInductionMachineSquirrelCage Y-D |
|
|
Modelica.Electrical.Machines.Examples.AsynchronousInductionMachines Test example: AsynchronousInductionMachineSquirrelCage transformer starting |
|
|
Modelica.Electrical.Machines.Examples.AsynchronousInductionMachines Test example: AsynchronousInductionMachineSquirrelCage with inverter |
|
|
Modelica.Electrical.Machines.Examples.AsynchronousInductionMachines Test example: AsynchronousInductionMachineSquirrelCage with inverter driving a conveyor |
|
|
Modelica.Electrical.Machines.Examples.AsynchronousInductionMachines Test example: AsynchronousInductionMachineSquirrelCage inverter drive |
|
|
Modelica.Electrical.Machines.Examples.AsynchronousInductionMachines AsynchronousInductionMachineSquirrelCage Steinmetz-connection |
|
|
Modelica.Electrical.Machines.Examples.AsynchronousInductionMachines Test example: AsynchronousInductionMachineSquirrelCage with losses |
|
|
Modelica.Electrical.Machines.Examples.AsynchronousInductionMachines Test example: Steady-State Initialization of AsynchronousInductionMachineSquirrelCage |
|
|
Modelica.Magnetic.FundamentalWave.Examples.BasicMachines Direct on line (DOL) start of asynchronous induction machine with squirrel cage |